Estimating Water Depth Remotely
Our ongoing work uses both video and LiDAR to estimate water depth, with goal of improving understanding of runup and overtopping at vulnerable sites. Water depth controls wave breaking across the surfzone and shoreline wave runup but is difficult to measure directly during storms. However, water depth can be estimated by measuring the speed of wave crests as they propagate across the surfzone and using wave theory to relate speed to depth. Video-based algorithms for depth estimation (e.g. cBATHY, Holman et al., 2018) are publicly available, and under continuous development by many researchers worldwide (e.g., Argus).

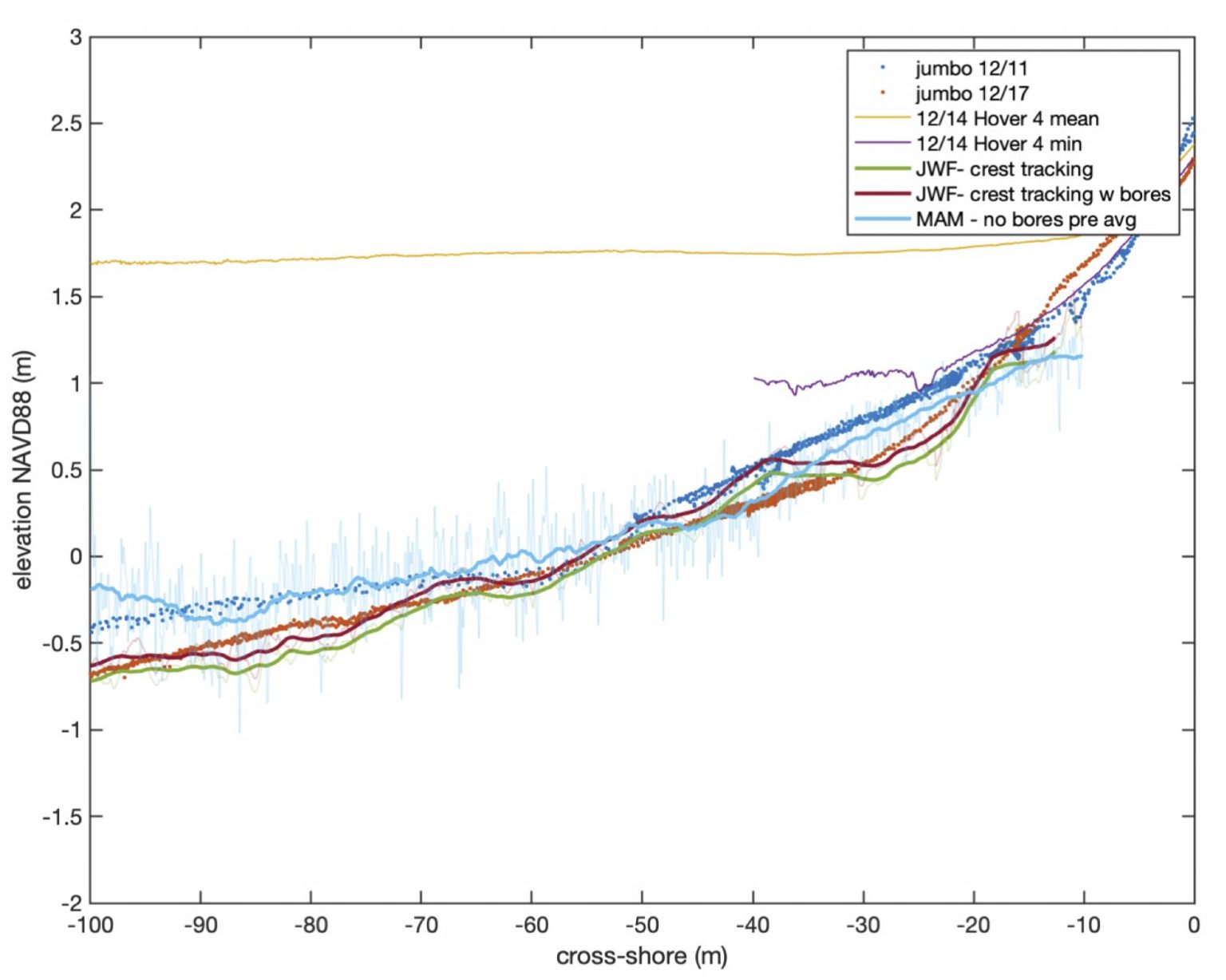
During the 2019-20 SCaRP (Storm CoAstal Response Project) at Torrey Pines State Beach, surfzone observations were obtained with a LiDAR on a stationary truck overlooking the beach, LiDAR mounted on a drone hovering above the beach, and with swash zone pressure sensors. With small instabilities in the drone data suppressed with a single ground control point, the hovering LiDAR is about as accurate the stationary LiDAR, with errors of a few cm. However, the inversion from the observed crest speed to the desired water depth has sometimes large errors. Ongoing work aims to quantify errors in existing depth-estimation from video methods, and to explore inversions using LiDAR, which provides more information than crest speed. Inversions from LiDAR crest and sea-surface gradient tracking are promising (Figure1).